
SIEMENS西门子上海朕锌电气设备有限公司
联系人:钟涛
24小时销售及维修热线:18221357245
电话:021-31139793
手 机:18221357245
Q Q : 1824547528
地址:上海市金山区枫湾路500号
《销售宗旨》:为客户创造价值是我们永远追求的目标!
《产品质量》:原装正品,全新原装!
《产品优势》:专业销售 薄利多销 信誉好,口碑好,价格低,货期短,大量现货,服务周到
SINAMICS S120新一代控制单元CU320-2DP具有更高的运算能力,如果要采用CU320-2DP替代原有的控制单元CU320,而不改变原有的项目数据,那么需要对原有项目进行升级。本文将以一个CU320 V2.6.2升级成CU320-2DP V4.3.2的例子,介绍项目升级的操作步骤。
1 准备条件
在升级前,需要满足以下条件:
- 硬件需求
a) 调试用PG/PC,比如带CP5512(DP通讯处理器)的笔记本电脑
b) S120控制单元
> CU320(6SL3040-0MA00-0AA1),带V2.6.2的CF卡
> CU320-2DP(6SL3040-1MA00-0AA0),带V4.3.2的CF卡 - 软件需求
a) STARTER V4.1 SP5或以上,或SCOUT V4.1 SP5或以上
2 升级步骤
项目升级过程,包括以下基本步骤:
- 备份原有项目
- 导出原项目数据
- 导入原项目数据
- 在线下载项目
2.1 备份原有项目
1. 连接PG/PC到CU320,比如通过Profibus DP。
2. 打开STARTER,创建新项目,在线并上载原项目数据,并做好备份。
2.2 导出原项目数据
使用STARTER打开原有项目文件,在左侧导航栏右键点击驱动单元,依次选择“Expert”?“Save project and export object”,如下图所示。
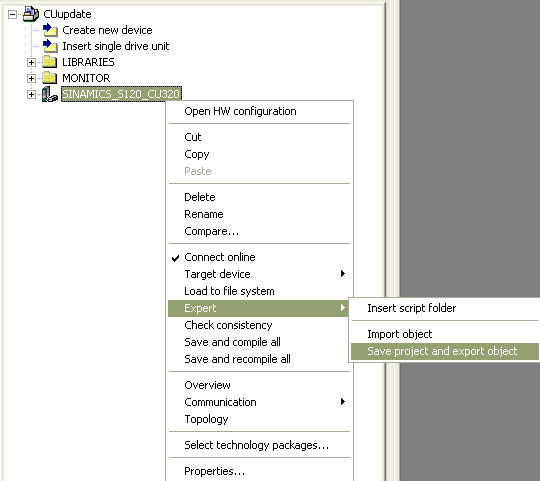
图1 在STARTER中选择导出数据
从弹出对话框中,点击“Browse”选择文件夹,点击“OK”开始导出项目数据。

图2 选择导出文件夹
导出完毕后,会在指定的文件夹下生成一个“SINAMICS_S120_CU320.xml”文件和数据文件夹,可以在窗口下半部的状态栏,看到导出状态“Successfully completed”的提示。
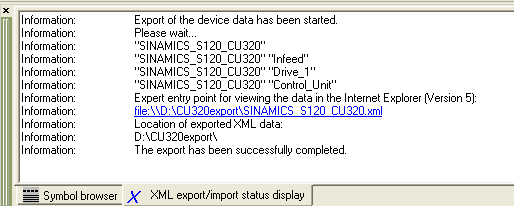
图3 项目导出成功后的提示
2.3 导入原项目数据
使用STARTER创建一个新项目,并插入一个新的驱动单元,选择版本为4.3.2的CU320-2DP。在左侧导航栏右键点击驱动单元,依次选择“Expert”?“
 西门子6SL3310-1TE33-1AA3
西门子6SL3310-1TE33-1AA3
图4在STARTER中选择导入数据
从弹出对话框中,点击“Browse”选择文件夹,找到之前导出的“SINAMICS_S120_CU320.xml”文件,点击“OK”开始导入项目数据。

图5 选择导入文件
导入完毕后,可以在窗口下半部的状态栏,看到导入状态“Successfully completed”的提示。

图6项目导入成功后的提示
2.4 在线下载项目
1. 使用STARTER连接驱动器CU320-2DP,并在线。
2. 下载升级后的项目数据。
3. Copy RAM to ROM。
至此,项目升级完成。
如果项目中使用了PLC,那么PLC的硬件组态也需要作相应的修改,把CU320改成CU320-2DP即可,其中的报文需要手动配置。
SINAMICS S120 SERVO模式下位置控制与速度控制方式的切换
应用描述
在S120 EPOS功能激活后,可以在MDI方式下进行位置模式与速度模式 (Setting-up mode)的切换,但此时位置环也是激活的,速度单位是1000 LU/min。但在一些工况下,不需要位置环,只需要速度控制,速度单位使用rpm。那么如何才能禁用位置环,实现位置控制与速度控制方式的切换呢?
本文将介绍S120 EPOS功能激活后位置控制与速度控制切换的方法。
解决方案
从Firmware V4.6开始,通过合理的参数设置,可以实现位置控制与速度控制方式的切换。
SINAMICS S120 SERVO模式下,在激活了基本定位EPOS功能后,控制系统结构如图1所示,

图1 控制系统结构图
从图1中看出,通过参数 P2550和P1142的组合设置,可以在两种控制方式之间切换;通过EPOS和P1155可以对位置和速度进行设定。两种控制方式的设置组合如下:
- 位置控制方式
- 位置方式激活:P2550=1,P1142=0
- 位置主给定:由EPOS指令产生,比如Jog
- 速度控制方式
- 速度方式激活:P2550=0,P1142=1
- 速度主给定:P1155
通过BICO连接,可以使用PLC报文或外部端子对控制方式进行切换。
在默认情况下,如果在运行中直接切换控制方式,可能会带来一些问题。比如,在从位置控制向速度控制切换时,位置控制器被禁用,系统会报 F07490故障(EPOS:Enable signal withdrawn while trversing);在位置与速度方式同时激活(P2550=1,P1142=1)时,位置控制器处于激活状态,此时速度给定P1155是一个扰动,系 统可能会报F07450、F07451、F07452等监视故障。实际应用中尽量避免两种方式同时激活。
为了解决以上问题,可以设置参数来屏蔽这些故障。对于F07490可以设置P2118.0=7490,P2119.0=0来屏蔽;对于 F07450、F07451、F07452可以设置P2542=0、P2544=0、P2546=0来屏蔽。